|
本文介绍在优麒麟Ubuntu Kylin 18.04操作系统上安装Gazebo的方法,是一款机器人仿真软件,附安装错误的解决方案及使用报告。
一、简介 Gazebo是一款3D动态模拟器,能够在复杂的室内和室外环境中准确有效地模拟机器人群。这款软件中包含了丰富的机器人模型,环境库以及各种各样的传感器,并且在操作方面它的程序设计极其方便,图形界面较简单,所以Gazebo 是一款很火的机器人仿真软件,常用来测试机器人算法,设计机器人和用现实场景进行回归测试等等。而且根据Gazebo官方建议,Gazebo目前最好在Ubuntu或者其他的Linux发行版上运行。出于对机器人相关知识的兴趣,我下载了这款软件并着手使用了一段时间,事实证明尽管是于我这种小白而言,Gazebo都是十分友好的,现在给大家简单分享一下。 Gazebo的网站:http://gazebosim.org/
注:这是Gazebo的官网的截图,这个官网办得非常好,里面内容特别详尽,很助于对这款软件的了解。
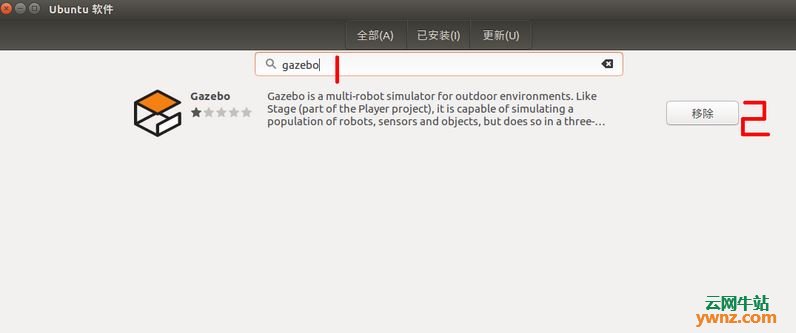
二、安装Gazebo的方法 在不同版本的Linux发行版上使用Gazebo并无太大差别,但是还是建议使用Ubuntu,毕竟官方教程都是在Ubuntu下运行的,所以我直接在Ubuntu Kylin 18.04系统上的软件商店中搜索到并下载安装,如下图:
点击进Gazebo就可以安装了,非常的简单。
三、安装Gazebo出现问题的解决方案 我开始在安装过程中总是遇到以下的这个问题(无法安装Gazebo:E: dpkg 被中断,您必须手工运行dpkg --configure -a解决此问题),如下图所示:
经过查找,解决方案如下。 在系统终端中依次序输入: sudo rm /var/lib/dpkg/updates/* (/var/lib/dpkg/updates资料夹里面的档案有问题, 使得更新套件出现错误,所以把它完全刪除,下面这个指令会重新建立。) sudo apt-get update (更新你的电脑里的 可以下载套件明细) sudo apt-get upgrade (根据上面的套件明细,更新已安裝的套件到最新版本) 运行以上命令后即可解决。 注:把软件清除彻底后重新下载了几次后成功。
四、使用Gazebo体验报告 Gazebo在网上有非常多的教程和分享,我就给大家简单介绍以下一些学习到的基本操作和它的图形用户界面与GUI(Graphical User Interface):
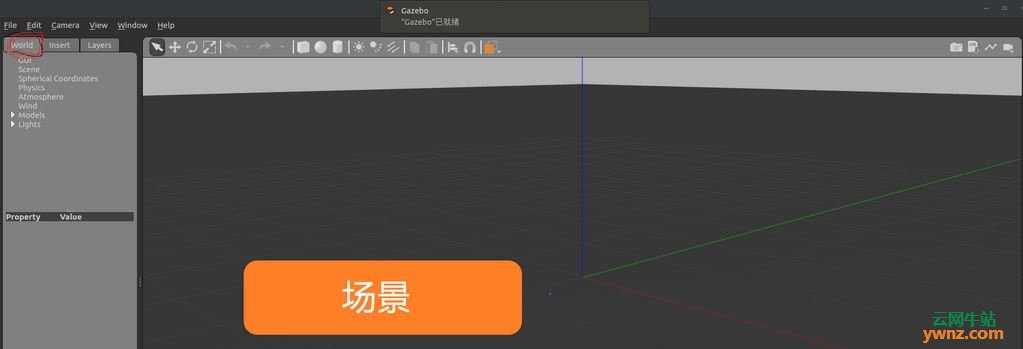
这是这款软件的初始界面,World这个按钮就是在右边这个很大很大的场景界面创建一个世界,World旁边的Insert按钮是模型库:
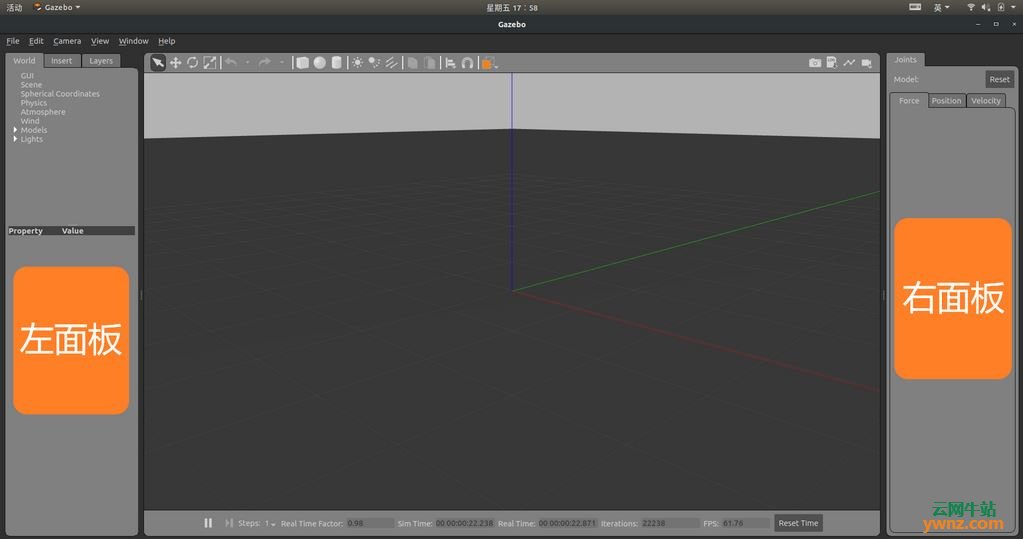
界面是有两侧面板的,左面板就是刚刚介绍过的初始界面的左边小面板,默认情况下Gazeb界面隐藏右侧面板。单击并拖动栏以将其打开。右侧面板可用于与所选模型的移动部件进行交互。如果未在场景中选择任何模型,则面板不会显示任何信息。 下面分别介绍一下上部工作栏和底部工作栏:
上部工作栏是Gazebo的主工具栏,它包含一些最常用的与模拟器交互的选项,例如:选择、移动、旋转和缩放对象等按钮,创造一些简单的形状(如立方体、球体、圆柱体),复制/粘贴模型选项: 选择模式(select mode):在场景中导航。 翻译模式(translate mode):选择要移动的模型。 旋转模式(rotate mode):选择要旋转的模型。 缩放模式(scale mode):选择要缩放的模型。 撤消/重做(undo/redo):撤消/重做场景中的操作。 简单形状(simple shape):将简单形状插入场景中。 灯光(lights):为场景添加灯光。 复制/粘贴(copy/paste):在场景中复制/粘贴模型。 Align:将模型彼此对齐。 Snap:将一个模型与另一个模型对齐。 更改视图(change view):从各个角度查看场景。
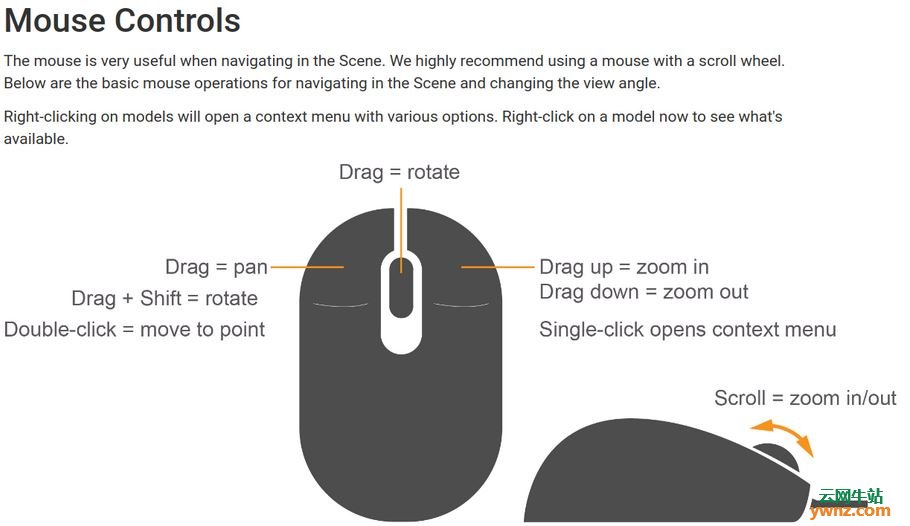
底部工具栏显示有关模拟的数据,如模拟时间及其与实际时间的关系。 “模拟时间”是指模拟运行时模拟器中时间流逝的速度,模拟时间可以比实时更慢或更快,具体取决于运行模拟所需的计算量。 “实时”是指模拟器运行时在现实生活中经过的实际时间,模拟时间和实时之间的关系称为“实时因子”(RTF),它是模拟时间与实时的比率,RTF衡量模拟运行与实时相比的速度或速率。 Gazebo的世界状况每迭代一次,计算一次,你可以在底部工具栏的右侧看到迭代次数,每次迭代都会将模拟推进固定的秒数,称为步长,默认情况下,步长为1 ms,你可以按暂停按钮暂停模拟,并使用步骤按钮逐步执行几个步骤。 最后再介绍一下鼠标操作方法,一般常用的是“shift+鼠标左键”转换视角,“鼠标左键”平移视角,“滚轮”缩放大小:
总的来说,Gazebo软件的体验感是很强的,做做几个简单结构的立方体圆柱体构成的机械臂这种都是很容易的。要说到Gazebo软件缺点的话,可能制作出来的外观标准不高,要搭出漂亮的机器人还是很难的,不过如果对外观没有要求的话,是完全够用的。最后,建议你使用Ubuntu平台来操作Gazebo,因为针对它的资源相当丰富,适合学习、使用的需求。
相关主题 |